 手機資訊
手機資訊 官方微信
官方微信摘要 申請號:201610994908.8申請日:2016.11.11國家/省市:中國哈爾濱(93)公開號:106514494A公開日:2017.03.22主分類號:B24B53/017...
申請號: 201610994908.8 申請日: 2016.11.11
國家/省市: 中國哈爾濱(93)
公開號: 106514494A
公開日: 2017.03.22 主分類號: B24B 53/017(2012.01)
分類號: B24B 53/017(2012.01)
申請人: 哈爾濱工業大學
發明人: 王金虎; 郭兵; 趙清亮; 張春雨; 楊冰; 顧興士
代理人: 楊立超
代理機構: 哈爾濱市松花江專利商標事務所(23109)
申請人地址: 黑龍江省哈爾濱市南崗區西大直街92號
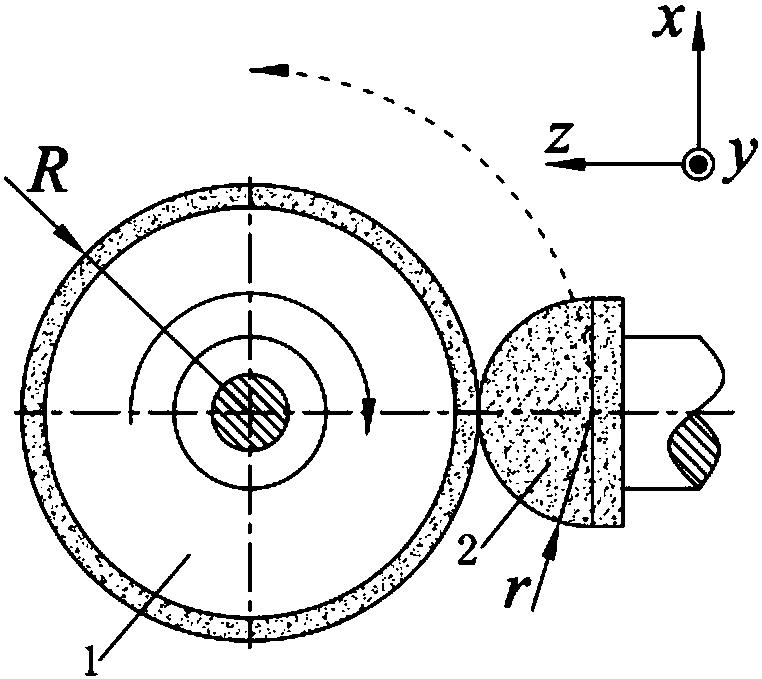
摘要: 一種基于雙圓弧擬合誤差補償的球頭砂輪精密修整方法,本發明涉及球頭砂輪精密修整方法。本發明是要解決球頭砂輪修整成本高,且難以獲得較高的面型精度和尺寸精度的問題而提出的一種基于雙圓弧擬合誤差補償的球頭砂輪精密修整方法。該方法基于碟片形電鍍金剛石修整輪磨損量低的特點,設定修整軌跡實現球頭砂輪的在位修整,通過對初步修整后球頭砂輪面形輪廓的檢測及雙圓弧擬合得到面形誤差方向及大小,最后在精密修整階段對誤差進行補償,從而修整出表面為標準球面且目標半徑為r的球頭砂輪,本發明應用于球頭砂輪精密修整領域。
主權利要求
1.一種基于雙圓弧擬合誤差補償的球頭砂輪精密修整方法,其特征在于,該方法具體是按照以下步驟進行的:步驟一、將修整輪和激光測微儀安裝在機床的x軸上,使修整輪回轉軸線平行于機床的y軸,激光測微儀的激光光束平行于機床的z軸;球頭砂輪安裝在z軸上,球頭砂輪回轉軸線平行于z軸;步驟二、粗對刀,確定修整輪和球頭砂輪的位置關系,確定修整運動起始點位置(x0,y0,z0);步驟三、對球頭砂輪進行粗修整;使用千分尺測量修整輪的半徑R,球頭砂輪修整的目標半徑為r,以(x0,y0,z0)位置為起始點,以R+r為半徑,使機床x軸和z軸聯動進行圓弧插補對球頭砂輪進行修整;其中,粗修整過程參數為:修整輪轉速為1500~6000rpm、球頭砂輪轉速為500~3000rpm、修整輪對球頭砂輪單次修整深度為1~5μm、修整輪修整過程中的進給速率為5~20mm/min;步驟四、粗修整后,基于雙圓弧擬合方法對球頭砂輪的面型誤差進行計算得到x方向對刀的偏心誤差Δx以及球頭砂輪的半徑誤差Δr;步驟五、根據偏心差值Δx修正修整運動的起始位置為(x0+Δx,y0,z0),修整出的球頭砂輪表面為標準球面;根據球頭砂輪的半徑誤差值Δr修正修整軌跡半徑為R+Δr+r,則修整得到目標半徑為r的球頭砂輪。







 豫公網安備41019702003604號
豫公網安備41019702003604號